最近在研究STM32的硬件CRC,想对比一下硬件CRC与软件CRC的运行速度。先看一下软件CRC的算法对应的代码:
uint16_t crc16_calculate(const uint8_t *data, size_t length)
{
uint16_t crc = 0x0000; // 初始值为0x0000
for (size_t i = 0; i < length; i++)
{
crc ^= data[i];
for (int j = 0; j < 8; j++)
{
if (crc & 0x0001)
{
crc = (crc >> 1) ^ 0xA001; // 0xA001是逆序的MODBUS多项式
}
else
{
crc = (crc >> 1);
}
}
}
return crc;
}如果看不懂没关系,让DeepSeek分析一下这段代码的功能:
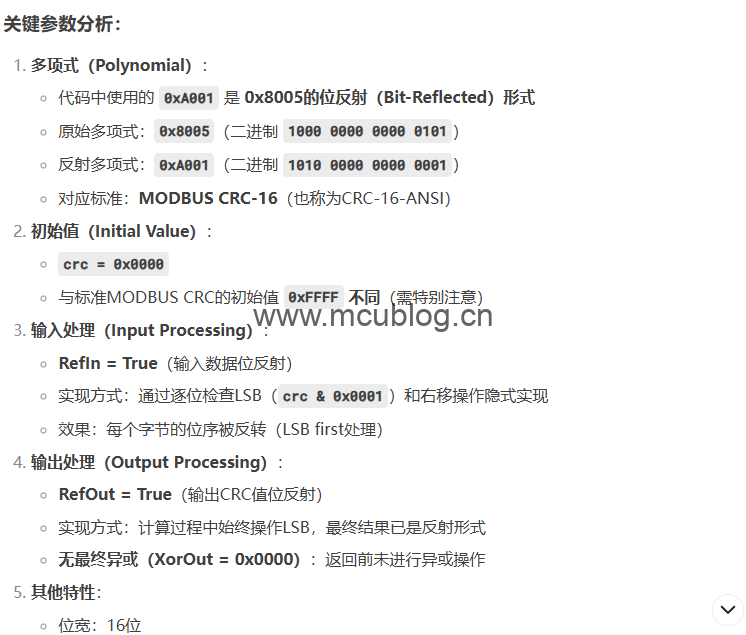
和标准的MODBUS CRC对比结果如下:
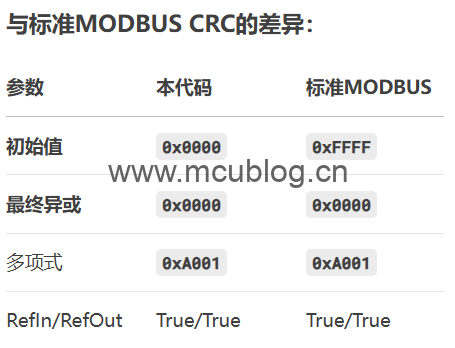
可以看到,只是初始值不同。
接下来,在STM32CUBEMX中实现CRC的硬件配置。
1、基础配置
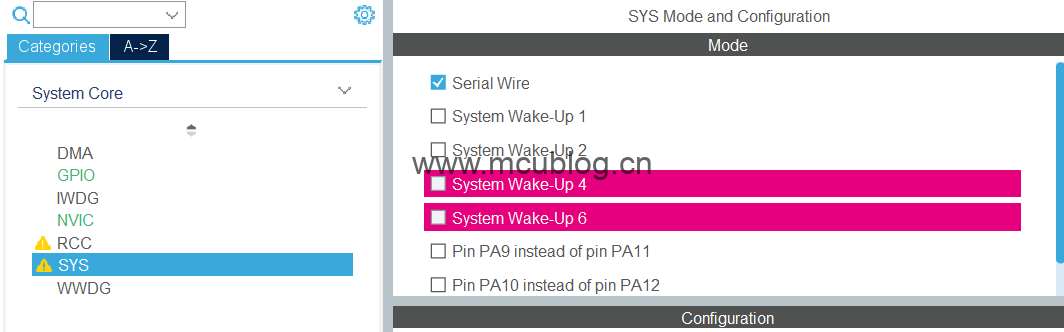
芯片型号这里选择的是STM32G030F6,时钟使用芯片内部RC,倍频到64MHZ。然后开启调式接口。
2、CRC配置
如下图所示:
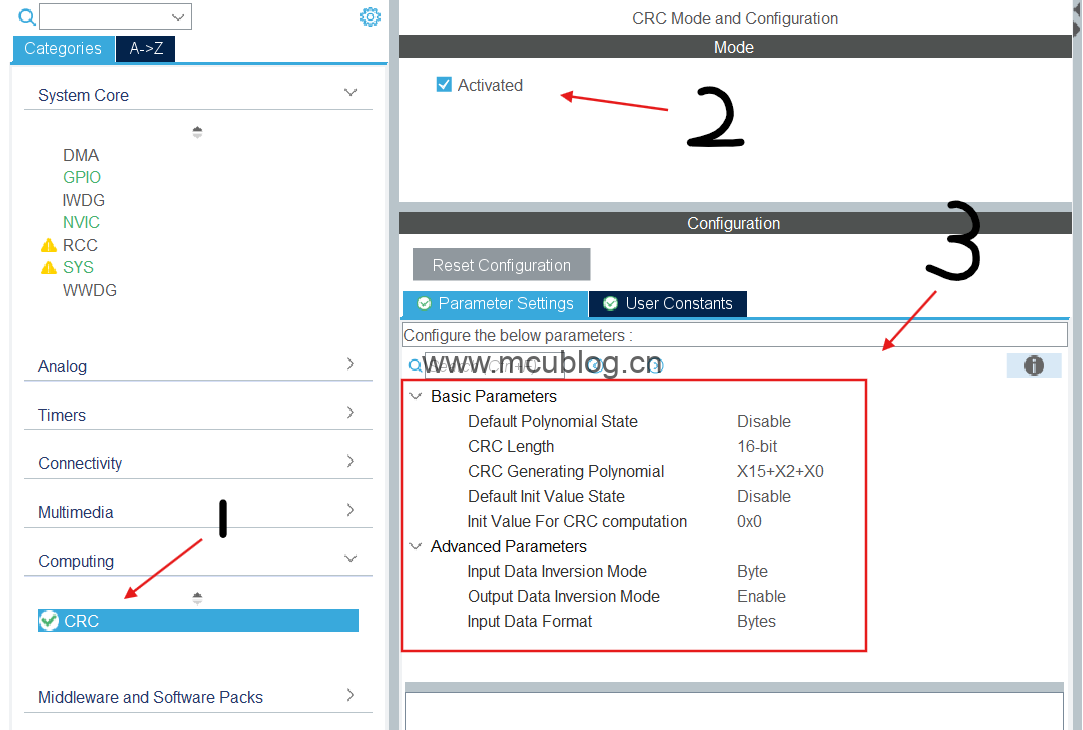
左侧Computing位置1那里,选中CRC。
位置2那里,勾选前面的方框,激活硬件CRC。
位置3那里相对麻烦一些,修改的参数比较多,照着我图里的配置改就行。主要配置:CRC长度16bit,多项式X15+X2+X0,初始值0,输入数据翻转模式选字节,输出数据翻转使能,输入数据的格式为字节。
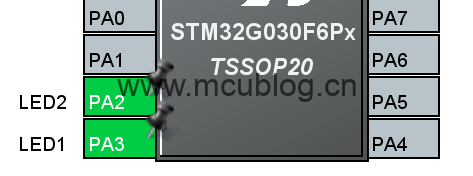
3、GPIO配置
配置两个IO为输出模式,用于CRC计算时输出高低电平,通过示波器查看所需时间。
4、生成工程
基操,不解释。
5、完善代码
生成工程后,先编译一下,确认没有报错,然后进行完善。
5.1 准备数据
定义一个192元素的数组和一个变量,用于进行CRC运算。
uint8_t test_data[192] = {0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A, 0x0B, 0x0C, 0x0D,
0x0E, 0x0F, 0x10, 0x11, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18, 0x19, 0x1A, 0x1B,
0x1C, 0x1D, 0x1E, 0x1F, 0x20, 0x21, 0x22, 0x23, 0x24, 0x25, 0x26, 0x27, 0x28, 0x29,
0x2A, 0x2B, 0x2C, 0x2D, 0x2E, 0x2F, 0x30, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37,
0x38, 0x39, 0x3A, 0x3B, 0x3C, 0x3D, 0x3E, 0x3F, 0xA5, 0x3F, 0x9C, 0x5E, 0x4B, 0x7D,
0x2A, 0x61, 0x86, 0x13, 0xF4, 0x0D, 0x39, 0x52, 0xB7, 0x8A, 0x1E, 0x6C, 0x45, 0x90,
0xD3, 0x27, 0x5A, 0xB1, 0x7E, 0x04, 0x19, 0x8F, 0x36, 0xC2, 0x5D, 0xA0, 0x12, 0x6B,
0x3C, 0x95, 0xE7, 0x4A, 0x81, 0xF3, 0x2D, 0x56, 0x9E, 0x07, 0x4C, 0xB8, 0x31, 0x7A,
0xE1, 0x5F, 0x24, 0x93, 0x68, 0x0E, 0x47, 0xA9, 0xD5, 0x3A, 0x16, 0x8C, 0x62, 0xF7,
0x4E, 0x01, 0xAA, 0x55, 0xAA, 0x55, 0xAA, 0x55, 0xAA, 0x55, 0x33, 0xCC, 0x33, 0xCC,
0x33, 0xCC, 0x33, 0xCC, 0x0F, 0xF0, 0x0F, 0xF0, 0x0F, 0xF0, 0x0F, 0xF0, 0x5A, 0xA5,
0x5A, 0xA5, 0x5A, 0xA5, 0x5A, 0xA5, 0x96, 0x69, 0x96, 0x69, 0x96, 0x69, 0x96, 0x69,
0xC3, 0x3C, 0xC3, 0x3C, 0xC3, 0x3C, 0xC3, 0x3C, 0xF0, 0x0F, 0xF0, 0x0F, 0xF0, 0x0F,
0xF0, 0x0F, 0x81, 0x7E, 0x81, 0x7E, 0x81, 0x7E, 0x81, 0x7E };
uint16_t crc16 = 0;5.2 添加软件CRC程序
为了和硬件CRC进行速度对比,需要把相应的软件代码添加到工程中。
uint16_t crc16_calculate(const uint8_t *data, size_t length)
{
uint16_t crc = 0x0000; // 初始值为0x0000
for (size_t i = 0; i < length; i++)
{
crc ^= data[i];
for (int j = 0; j < 8; j++)
{
if (crc & 0x0001)
{
crc = (crc >> 1) ^ 0xA001; // 0xA001是逆序的MODBUS多项式
}
else
{
crc = (crc >> 1);
}
}
}
return crc;
}5.3 控制相应IO输出
为了方便示波器观察,先拉高LED1管脚的电平,然后调用硬件CRC算法,最后拉低LED1管脚的电平。
同理,在软件CRC算法前后控制LED2管脚的电平。
while (1)
{
//硬件CRC
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
crc16 = HAL_CRC_Calculate(&hcrc, (uint32_t *)test_data, 192);
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET);
HAL_UART_Transmit(&huart1, (uint8_t *)&crc16, 2, 0xFFFF);
//软件CRC
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_SET);
crc16 = crc16_calculate(test_data, 192);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
HAL_UART_Transmit(&huart1, (uint8_t *)&crc16, 2, 0xFFFF);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}通过这种方式,用示波器看IO高电平持续时间即可得出算法运行时间。
6、下载上电
编译下载,接入示波器。先看LED1脚高电平持续时间:
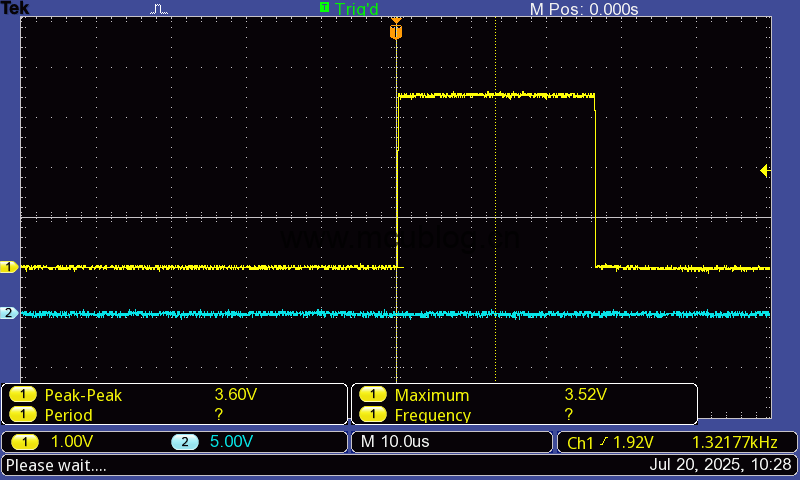
可以看到,高电平持续时间约26us多一点。即,STM32硬件CRC对这些数据校验,所需时间约26us。
然后看LED2脚高电平持续时间:
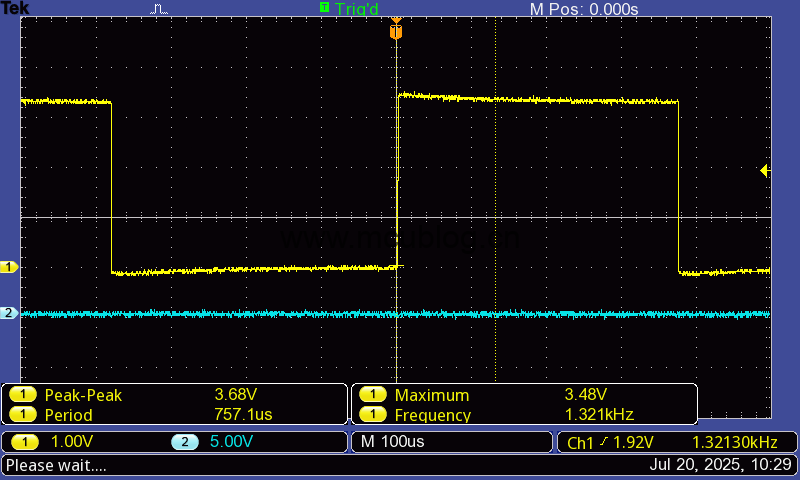
可以看到,高电平持续时间约360us多一些。即,STM32使用软件算法实现CRC校验,所需时间约360us多。
对比两者,可以明显看到硬件CRC执行速度更快,仅为软件方式的十分之一不到。所以,硬件允许的情况下,尽量使用硬件CRC的方式,速度快,节省时间。
我是单片机爱好者-MCU起航,打完收工!
有需要源码的,公众号回复关键词:030,或者“32硬件CRC”。
可惜不是ModbusCRC
要不要试试查表法再比较一下时间差别?
不想试了,我懒~~