modbus是一个非常好的串口协议(当然也能用在网口上),它简洁、规范、强大。可以满足大部分的工业、嵌入式需求。
这里详细说下如何将freemodbus移植到stm32平台。我之前下载的版本是1.5,当前官网最新的版本是1.6。两者差别不大,这里以1.5版本做演示。
1、下载好之后,解压得到如下内容:
我们需要的是modbus这个文件夹,和demo->BARE下的port文件夹。
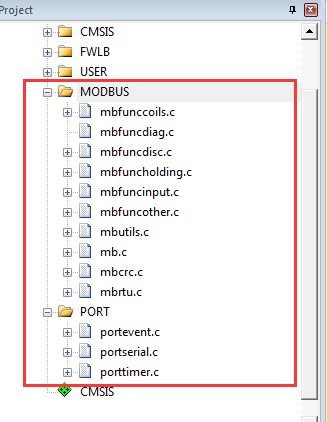
2、准备一个STM32的工程文件夹,在工程文件夹下新建一个文件夹:FreeModbus。将第一步获取的两个文件夹放到里面。
打开工程,添加两个group,名字分别为modbus和port。将这两个文件夹下的C文件都添加进来,tcp相关的除外。
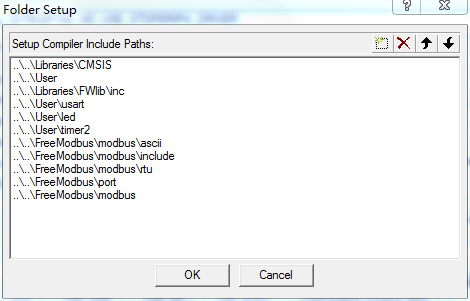
文件包含路径,也添加这几个文件夹的位置:
3、完善portserial.c文件。该文件就是modbus通信中用到的串口的初始化配置文件。我这里选择usart1,波特率9600.
第一次打开这个文件,内容如下:
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
/* If xRXEnable enable serial receive interrupts. If xTxENable enable
* transmitter empty interrupts.
*/
}
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
return FALSE;
}
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
/* Put a byte in the UARTs transmit buffer. This function is called
* by the protocol stack if pxMBFrameCBTransmitterEmpty( ) has been
* called. */
return TRUE;
}认真看一下函数名字,你会发现这些函数分别是:串口使能、串口初始化、发送一个字节、接收一个字节等等。
完善后代码如下:
/* ----------------------- Start implementation -----------------------------*/
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
/* If xRXEnable enable serial receive interrupts. If xTxENable enable
* transmitter empty interrupts.
*/
if(xRxEnable == TRUE)
{
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
else
{
USART_ITConfig(USART1, USART_IT_RXNE, DISABLE);
}
if(xTxEnable == TRUE)
{
USART_ITConfig(USART1, USART_IT_TC, ENABLE);
}
else
{
USART_ITConfig(USART1, USART_IT_TC, DISABLE);
}
}
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
USART1_Config((uint16_t)ulBaudRate);
USART_NVIC();
return TRUE;
}
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
/* Put a byte in the UARTs transmit buffer. This function is called
* by the protocol stack if pxMBFrameCBTransmitterEmpty( ) has been
* called. */
USART_SendData(USART1, ucByte);
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
/* Return the byte in the UARTs receive buffer. This function is called
* by the protocol stack after pxMBFrameCBByteReceived( ) has been called.
*/
*pucByte = USART_ReceiveData(USART1);
return TRUE;
}
/* Create an interrupt handler for the transmit buffer empty interrupt
* (or an equivalent) for your target processor. This function should then
* call pxMBFrameCBTransmitterEmpty( ) which tells the protocol stack that
* a new character can be sent. The protocol stack will then call
* xMBPortSerialPutByte( ) to send the character.
*/
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
/* Create an interrupt handler for the receive interrupt for your target
* processor. This function should then call pxMBFrameCBByteReceived( ). The
* protocol stack will then call xMBPortSerialGetByte( ) to retrieve the
* character.
*/
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
/**
* @brief This function handles usart1 Handler.
* @param None
* @retval None
*/
void USART1_IRQHandler(void)
{
//发生接收中断
if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
prvvUARTRxISR();
//清除中断标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
if(USART_GetITStatus(USART1, USART_IT_ORE) == SET)
{
USART_ClearITPendingBit(USART1, USART_IT_ORE);
prvvUARTRxISR();
}
//发生完成中断
if(USART_GetITStatus(USART1, USART_IT_TC) == SET)
{
prvvUARTTxReadyISR();
//清除中断标志
USART_ClearITPendingBit(USART1, USART_IT_TC);
}
}其中USART1_Config((uint16_t)ulBaudRate);和 USART_NVIC();是串口初始化的代码,如下:
/**
* @brief USART1 GPIO 配置,工作模式配置。9600 8-N-1
* @param 无
* @retval 无
*/
void USART1_Config(uint16_t buad)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = buad;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
/**
* @brief USART1 中断 配置
* @param 无
* @retval 无
*/
void USART_NVIC(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure one bit for preemption priority */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* 配置中断源 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
4、然后是porttimer.c文件,modbus工作时需要一个定时器,所以这里配置一个定时器。定时器时基是50us,周期做为参数输入。代码如下:
/* ----------------------- Start implementation -----------------------------*/
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
timer2_init(usTim1Timerout50us);
timer2_nvic();
return TRUE;
}
void
vMBPortTimersEnable( )
{
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM2,0x0000);
TIM_Cmd(TIM2, ENABLE);
}
void
vMBPortTimersDisable( )
{
/* Disable any pending timers. */
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE);
TIM_SetCounter(TIM2,0x0000);
TIM_Cmd(TIM2, DISABLE);
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
prvvTIMERExpiredISR();
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}其中 timer2_init(usTim1Timerout50us) 和 timer2_nvic() 是timer2初始化函数,内容如下:
void timer2_init(uint16_t period)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_DeInit(TIM2);
TIM_TimeBaseStructure.TIM_Period = period;
TIM_TimeBaseStructure.TIM_Prescaler = (1800 - 1);
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_Cmd(TIM2, ENABLE);
}
void timer2_nvic(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}5、在main.c文件中,定义各个模拟寄存器的地址和大小。
//输入寄存器起始地址
#define REG_INPUT_START 0x0000
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0000
//保持寄存器数量
#define REG_HOLDING_NREGS 8
//线圈起始地址
#define REG_COILS_START 0x0000
//线圈数量
#define REG_COILS_SIZE 16
//开关寄存器起始地址
#define REG_DISCRETE_START 0x0000
//开关寄存器数量
#define REG_DISCRETE_SIZE 166、补全输入寄存器操作函数、保持寄存器操作函数。modbus功能进行初始化,设置地址和波特率。这部分内容可以参考官方资料里的例程,也可以直接复制别人写好的。我这里放别人写好的代码:
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
usRegInputBuf[0] = 'I';
usRegInputBuf[1] = ' ';
usRegInputBuf[2] = 'a';
usRegInputBuf[3] = 'm';
usRegInputBuf[4] = ' ';
usRegInputBuf[5] = 'I';
RCC_Config();
eMBInit(MB_RTU, 0x01, 0x01, 9600, MB_PAR_NONE);
eMBEnable();
for(;;)
{
(void)eMBPoll();
}
}
//static void Delay(__IO uint32_t nCount) //简单的延时函数
//{
// for(; nCount != 0; nCount--);
//}
/*********************************************END OF FILE**********************/
/****************************************************************************
* 名 称:eMBRegInputCB
* 功 能:读取输入寄存器,对应功能码是 04 eMBFuncReadInputRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读取的寄存器个数
* 出口参数:
* 注 意:上位机发来的 帧格式是: SlaveAddr(1 Byte)+FuncCode(1 Byte)
* +StartAddrHiByte(1 Byte)+StartAddrLoByte(1 Byte)
* +LenAddrHiByte(1 Byte)+LenAddrLoByte(1 Byte)+
* +CRCAddrHiByte(1 Byte)+CRCAddrLoByte(1 Byte)
* 3 区
****************************************************************************/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( usAddress >= REG_INPUT_START )
&& ( usAddress + usNRegs <= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegHoldingCB
* 功 能:对应功能码有:06 写保持寄存器 eMBFuncWriteHoldingRegister
* 16 写多个保持寄存器 eMBFuncWriteMultipleHoldingRegister
* 03 读保持寄存器 eMBFuncReadHoldingRegister
* 23 读写多个保持寄存器 eMBFuncReadWriteMultipleHoldingRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读写的寄存器个数
* eMode: 功能码
* 出口参数:
* 注 意:4 区
****************************************************************************/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress >= REG_HOLDING_START)&&\
((usAddress+usNRegs) <= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://读 MB_REG_READ = 0
while(usNRegs > 0)
{
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] >> 8);
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNRegs--;
}
break;
case MB_REG_WRITE://写 MB_REG_WRITE = 0
while(usNRegs > 0)
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegCoilsCB
* 功 能:对应功能码有:01 读线圈 eMBFuncReadCoils
* 05 写线圈 eMBFuncWriteCoil
* 15 写多个线圈 eMBFuncWriteMultipleCoils
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 线圈地址
* usNCoils: 要读写的线圈个数
* eMode: 功能码
* 出口参数:
* 注 意:如继电器
* 0 区
****************************************************************************/
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress >= REG_HOLDING_START)&&\
((usAddress+usNCoils) <= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://读 MB_REG_READ = 0
while(usNCoils > 0)
{
// *pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] >> 8);
// *pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNCoils--;
}
break;
case MB_REG_WRITE://写 MB_REG_WRITE = 1
while(usNCoils > 0)
{
// usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
// usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNCoils--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegDiscreteCB
* 功 能:读取离散寄存器,对应功能码有:02 读离散寄存器 eMBFuncReadDiscreteInputs
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNDiscrete: 要读取的寄存器个数
* 出口参数:
* 注 意:1 区
****************************************************************************/
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
( void )pucRegBuffer;
( void )usAddress;
( void )usNDiscrete;
return MB_ENOREG;
}7、修改mbrtu.c文件,否则modbus从机收到命令后,只会返回一次数据。在函数“eMBRTUSend”中。
eMBErrorCode
eMBRTUSend( UCHAR ucSlaveAddress, const UCHAR * pucFrame, USHORT usLength )
{
eMBErrorCode eStatus = MB_ENOERR;
USHORT usCRC16;
ENTER_CRITICAL_SECTION( );
/* Check if the receiver is still in idle state. If not we where to
* slow with processing the received frame and the master sent another
* frame on the network. We have to abort sending the frame.
*/
if( eRcvState == STATE_RX_IDLE )
{
/* First byte before the Modbus-PDU is the slave address. */
pucSndBufferCur = ( UCHAR * ) pucFrame - 1;
usSndBufferCount = 1;
/* Now copy the Modbus-PDU into the Modbus-Serial-Line-PDU. */
pucSndBufferCur[MB_SER_PDU_ADDR_OFF] = ucSlaveAddress;
usSndBufferCount += usLength;
/* Calculate CRC16 checksum for Modbus-Serial-Line-PDU. */
usCRC16 = usMBCRC16( ( UCHAR * ) pucSndBufferCur, usSndBufferCount );
ucRTUBuf[usSndBufferCount++] = ( UCHAR )( usCRC16 & 0xFF );
ucRTUBuf[usSndBufferCount++] = ( UCHAR )( usCRC16 >> 8 );
/* Activate the transmitter. */
//发送状态转换,在中断中不断发送
eSndState = STATE_TX_XMIT;
//启动第一次发送,这样才可以进入发送完成中断
xMBPortSerialPutByte( ( CHAR )*pucSndBufferCur );
pucSndBufferCur++; /* next byte in sendbuffer. */
usSndBufferCount--;
//使能发送状态,禁止接收状态
vMBPortSerialEnable( FALSE, TRUE );
}
else
{
eStatus = MB_EIO;
}
EXIT_CRITICAL_SECTION( );
return eStatus;
}8、修改mbconfig.h文件,取消对ASCII的支持。
#define MB_ASCII_ENABLED ( 0 )9、保存,编译,下载。使用专用的modbus工具测试。工具配置如下:
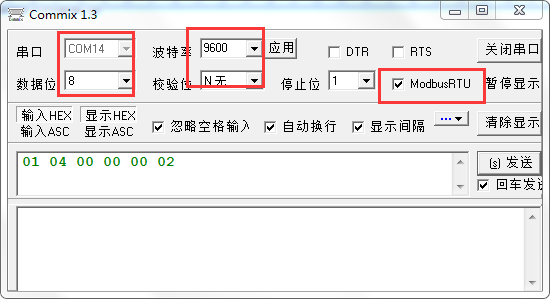
modbus指令格式如下:

咱们这里设置如下:01 04 00 00 00 02,功能码04,起始地址0,数据长度2.校验码没有写怎么办?
这就是这个工具的便利之处!我们不用管,它会自动计算!直接点击发送即可。得到结果如下:
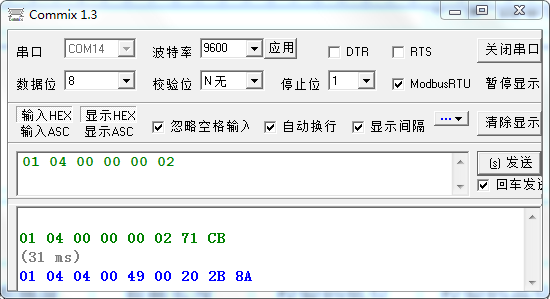
可以看到下面的框里,绿色的是我们发送的内容,最后两位是工具自动补上的。蓝色内容是单片机(也就是modbus从机)返回给我们的。
没有问题,打完收工!
工程模版和modbus工具,我上传到了公众号:单片机爱好者,回复关键词:modbus,即可获取。
写得好!!!
多谢捧场!
读线圈程序里为啥用保持寄存器的起始地址和偏移量?
必须点赞!modbus
多谢捧场
因本人小白,看网上大部分文章都不知道大概的配置思路,现在终于清晰很多了,非常感谢。
客气了,有用就行
多谢分享!!!!!!!!
客气了,多谢捧场。
那么这个单片机的程序是主站还是从站呢
从站
我的发送没有对,可能是缓冲区没有对,可以帮助一下吗