本贴由MCU起航原创,首发于博客-MCU起航,版权归本人所有,如有转载,请注明来源!
大家好,我是起航,我又来了,这次跟大家聊聊平衡小车。了解我的朋友都知道,我极有可能会把帖子写的又臭又长,所以,,,做好准备,上车吧!
先说项目初衷:想给我外甥做个玩具。
是的,就这么简单。但是做的时候发现,呵呵~~~
外甥是2010年11月份生的,现在上小学了。萌生这个想法的时候是2016年,那时做为一名电子工程师经常在我姐面前吹牛,说我有多厉害。
我姐说,你给我做个空调吧,家里缺个空调! 我…………
然后我觉得,在小朋友面前显摆一下自己有多厉害还是可以的。所以,想了想做什么合适。其实,可选项也没几个。我总不能给外甥做个流水灯、MP3、电子秤吧。
四轴飞行器目前不行,因为有螺旋桨,非常容易伤到小朋友。所以,小车是首选。当然,四个轱辘的就算了,没什么意思。要做就做两轮,这样才有成就感。
确定做什么了,然后就是收集相关资料。我把网上能搜到的大部分自平衡小车资料都下载,过了一遍,这是基本功课,必须要做好。
看完才知道,两轮自平衡车,最开始是给双腿行动不变的人设计的。但是,发明出来以后,发现它在保安、巡逻等方面作用更加明显,于是就慢慢普及开了。
国内早期的自平衡小车的方案我找到的是阿莫电子论坛的一篇帖子,2010年的,很牛逼。方案如下:
控制器:ATmega16;8MHz;
加速度传感器:MMA2260;陀螺仪:EWTS82;
传感器的融合:卡尔曼滤波;
马达:EN_2342CR(速比64)+双路12脉冲编码器+CD40106对信号整形;
驱动板芯片:CD4001+IR2111+IRF1404(驱动电流可以很大);
还有图片:
注意看他的控制器和传感器,和现在的完全不一样。
那个时候AVR单片机还是很火的。他用了ATmega16,注意频率,只有8MHZ。然后是传感器:一个加速度传感器,一个陀螺仪!那个时候MPU6050貌似还没露面(我也不知道是还没被设计出来,还是没推广开,知道的可以科普下),为了获取加速度和角度,用了两个传感器。所以现在的我们还是很幸福的。
那个帖子虽然老,但是讨论了很多非常有价值的问题,有兴趣的同学可以百度:
自己做的双轮自平衡小车
链接就不放了,度娘不稳定。
时间当时是2016年,网上大部分的方案是STM32+MPU6050,也有一些用arduino做的。Arduino的问题我稍后再说,当时想的是:随大流!既然32的案例多,那么资料就多,出于稳妥,先买个样机玩玩吧。
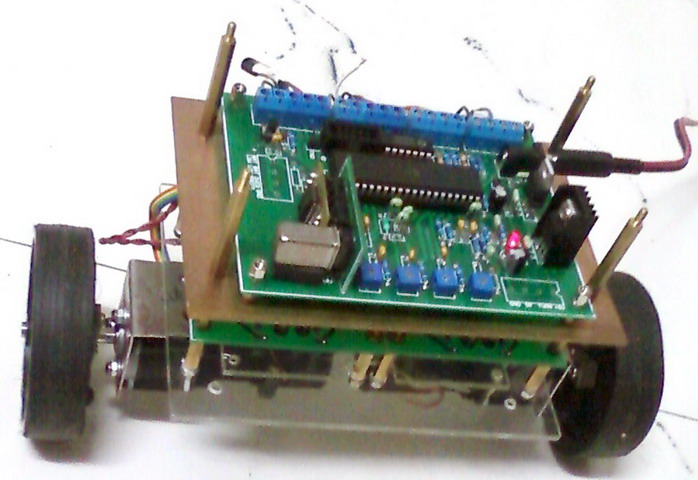
当时没认真对比,随便买了个。买回来才发现,资料少的可怜。店铺名称我就不说了,这里奉劝大家,无论买什么,多咨询,多对比。否则学不好,不要怪别人。样子如图:
外形还是很霸气的,大小跟我的一只鞋差不多大,电机扭矩也很给力。但是依然弥补不了卖家配套资料不足的短板。
资料少是一方面,让我惊掉下巴的是,程序居然是用STM32的2.0的库写的。没经历过STM32库函数版本变动的同学是不会理解的,32的库从刚出来到现在相对稳定的3.5版本,变更了几次,每次都是大变样。早期的工程师叫苦不迭,甚至还有的扬言说要自己写一套库函数。
但当时是2016年,16年啊!!!3.5版本已经稳定好几年了!但是卖家提供的程序竟然是2.0版本的库函数,当然,功能是没有问题的。所以我早期的工作就是把整套程序用3.5的库重写一遍,既熟悉了程序流程,也方便了后续的调试。
资料少我忍了,又让我发现一个问题,卖家的原理图和实际硬件不配套。我耐着性子跟卖家反映了这个问题,给出的答复是:技术保密,不影响应用。
我再忍。
然后又发现一个问题,这个电路没有留JTAG或者SW接口,只有一个串口下载的接口。注意,连排针上都没有调试接口,可想而知,这个板子设计的有多失败。
到这里,我竟然已经习惯了。也无所谓了,于是就开始改程序改着玩。
前面我在把库函数版本从2.0变到3.5的时候,已经过了一遍流程。所以每段程序的功能我几乎都了解了,这套板子是STM32+MPU6050,然后使用6050内部DMP固件的方式来获取角度。这种方式获取的值的精度是很高的,而且不需要再经过滤波。但是同样的,对单片机的ROM和RAM的要求也很高。换句话说,低配的单片机玩不来!
先改哪?
就从呼声最高的PID参数开始吧。关于PID参数整定的文章,网上一搜一大堆。同样,抱怨参数不好调的文章也是一大堆。那我就改参数改着玩吧。
结果发现,无论怎么改(只要变动不是特别夸张),,,,,貌似小车都很稳定,这……..和我预想的不太一样啊……
这个问题曾经困扰了我很长一段时间,直到搜了一堆相关资料又看了稚晖的文章,才解决了我的疑惑。稚晖是谁?后面再说,同样,会提到他的蛋黄,一个萌翻了的自平衡小车。
简单来说,平衡车好不好调,有几个因素影响:
- 处理器性能,DMP固件的方式肯定是很好的,32没问题,但是一些低端单片机就玩不来了。这时,就需要读取原始数据,然后做一阶滤波或者卡尔曼滤波,这种方式来实现。
- 电机性能,非常重要!!!力矩越大越好。参数整定,说是P+I+D三个,但如果电机性能好,只要P+D就够了,不需要I。现在市面上的大部分平衡车套件几乎也不需要I,毕竟加了一个参数,难度会上去很多。
- 编码器精度。电机性能好,只能保证角度平衡,但是会朝某个方向一直跑,越跑越快,最后速度跟不上,倒下。编码器可以检测电机转了多少,不是转多少圈,是一圈的几分之几。精度高的编码器可以检测电机转了几百分之一 圈,精度低的编码器只能测 十几分之一 圈,甚至几分之一。
上面三点,是从硬件的角度来说的。当然,还有一些别的因素,比如说结构上,重心越低越好,体积越大越好调等。欢迎大家补充。
也就是说,电机性能不错,单片机性能也高,所以PID参数调节难度不大。这就尴尬了,我都做好百米冲刺的准备了,结果告诉我已经到终点了….
既然这样,那就换个玩法。现在的角度获取不是DMP方式吗? 我不用了,换成直接读取原始数据,然后一阶滤波。
先说可行性,这个思路的可行性是没有问题的。网上普遍的反应是这个方式简单,虽然数据不是特别准,但是做小车没问题。我曾经在极客工坊论坛潜水很长一段时间,看了很多案例,这种原始数据+一阶滤波算是比较常见的。
但是有一点,极客工坊里大部分都是arduino,而arduino的晶体一般都是16MHZ,为了确保我和他们尽量处于同一起跑线,我把STM32的频率也降到了16MHZ。然后,噩梦开始了……
代码如下:
void Yijielvbo(float angle_m, float gyro_m)
{
float dt = 0.0f;
dt = (float)TIM_GetCounter(TIM1);
dt = dt / 1000000;
TIM_SetCounter(TIM1, 0);
angel = K1 * angle_m+ (1-K1) * (angel + gyro_m * dt);
}
dt是每次获取角度的时间间隔。使用这种方式,给我最大的感觉就是严重的滞后性。参数K1和滞后性相关,我也进行了调试,有效果,但是达不到要求。
小车放在地上,能明显感觉到已经向一个方向偏了一段时间了,才反映过来。如果不使用一阶滤波也不用卡尔曼,可以感觉到小车的反映速度明显快很多(当然了,还是站不起来~~~)
所以,我当时主要疑惑的问题:一阶滤波的滞后性怎么处理,是否和电机性能有关?
现在回想起来,有两个可能因素:1、STM32频率从72降到16MHZ的时候,IIC的速度可能忘了调节了;2、一阶滤波的代码可能没调好。
一阶滤波的方式当时试了好几天,最后忍不了了。换卡尔曼滤波吧!
这里要说一下,卖家发货时提供的程序只有一份读取DMP方式的,没有一阶滤波、也没有卡尔曼。跟卖家软磨硬泡了一下午,给我找来了一份卡尔曼的,电机驱动方向有点问题,PID参数也需要调整。
于是我拿过来,整了一下,在16MHZ的情况下,竟然就占了起来。
卡尔曼,你是个好人!
到这里,角度获取的几种方式,我都已经过了一遍了。优缺点,心里也有数了。接下来,做点什么?(原谅我自己玩的比较嗨,快忘了给外甥做玩具的事了)
我想把程序简化一下,看看能简化到什么程度,于是开始了给这套程序瘦身。不瘦不知道,一瘦发现卖家的程序里很多没用的东西(我竟然已经习惯了这种卖家,没有情绪拨动了),于是我都逐步测试,确认没用,然后删了。
简化之前,下载到单片机里面要占用30多K,简化以后,我印象里只有15K左右了。如果使用寄存器方式编程的话,代码量还要小一些。
到这里,我已经清楚要给外甥做一个什么样的玩具了。这个玩具不只是给他的,也是给我自己的。
硬件电路框架还是网上普遍在用的,但是核心我已经不想用STM32了,因为没有意思。我想用STM8,因为做这个东西,8位单片机足够了。
这也是我做这个东西,强烈想表达的一个想法。有一段时间,我在QQ群里和网友交流技术问题的时候,经常会有一些新人提问:学8位单片机好,还是学STM32好?
为什么他们会问这样的问题?
因为32位单片机的各方面性能几乎都是碾压8位单片机的,很多用人单位确实也在技能要求里面提到了会用到32。但是,这并不意味着8位单片机就不行了,说个最俗的因素,8位单片机便宜!
骚尼哥在回答这类问题时,说了一段话,我印象很深:会用STM32不代表牛逼,会用8位单片机不代表不牛逼,能把STM32的项目用8位单片机做出来,这才算牛逼!
是的,32位单片机确实性能强,但如果用不到合适的地方,就是资源的浪费,这不是一个优秀的工程师该做的事。
很多新人做项目,很少考虑需要用到的处理器性能,动不动就是32位单片机。这对一件商品来说,确实是一件好事,因为被大众认可了。但是对一个工程师来说,我不这么认为。我印象很深的一件事,一个学生想做个平衡小车,但是角度环调不好,问我怎么回事。我让他跟我说下他的硬件方案:他说他用的STM32F4系列的某个芯片(型号我记不清了),电机是网上随便找的。
我当时的心里是一阵阵的无力感,F4系列都用上了,呵呵,但是电机这个最重要的因素却没认真考虑。
为什么不用arduino?网上的案例也很多,学起来还简单。
呵呵…
先说arduino的来源吧。他是意大利的一名教师和一名晶体工程师发明的一个灵活性非常高的电子平台,主要是因为当时的学生跟他抱怨找不到便宜好用的微控制器。
Arduino有多好用?
由于我的工作的原因,我和北京一些中小学有接触。我能感觉到的是,北京这边,基于arduino的单片机课程,或者机器人课程是非常多的,面向的都是中小学生。所以,中小学生都能学会的编程,有多难?
所以说,它的火爆程度还是很高的。那,能不能用它来做产品?
这就是个很严肃的问题了。做产品的话,首先要考虑的是什么(抛去成本)?
稳定性,稳定性,稳定性!!!
如果稳定性不行,入门再简单,功能再强大,都是扯淡!明白?
那么,它的稳定性到底行不行?这其实是一个备受争议的问题。因为最初它是由于教学的目的被设计出来的,当前国内用的最多的也只是DIY爱好者和一些中小学的兴趣课里。
罗列一下它在国内的主要用途:DIY工具,中小学生兴趣课,还有一些玩具。这样的背景,导致国内几乎很少有团队敢在设计产品的时候拍着胸脯说用它没问题。
那么,它真的不行?
注意我的措辞,我刚才在罗列用途的时候,修饰词是“国内”。在国外,其实是有很多公司用arduino来设计产品的,当然也有一些成功的商业产品。
为什么国内没有?或者很少?
没人愿意让自己去试错。在国内没有出现大量的成功案例之前,这个现象估计很难改变。举个例子,我之前曾经在一家汽车电子公司里工作过。汽车是一个电磁环境非常复杂的东西,选用芯片的时候,公司老板问的最多的一句话就是:同行有没有用过这个芯片?
有的话,才敢放心用。否则,既说服不了自己,也说服不了客户。因为一旦出现问题,要么切换供应商,要么就召回…..
用汽车电子的例子,可能有些极端,但我想表达的意思是:在没有足够案例证明的情况下,它很难被接受。
关于arduino的问题,大家可以看一篇文章:关于使用Arduino做开发的二三理解
百度吧。这篇文章算是说的比较中肯的。简单来说,在未来,它可能在国内的公司里推广开来,目前的话,快速开发一些小批量功能不太复杂的产品可以考虑,否则的话,轻易还是不敢用。
这里再说个事,之前曾经有个大学生跟我聊天,说他们实验室的人基本都是用arduino,51,32都不怎么学。
我当时心里咯噔一下,第一反应就是:这群学生被耽误了….
然后他说,他觉得arduino和传统单片机差别很大,还是要学一下其它的,否则不好找工作。后面这句话让我还算欣慰。
未完待续…..
本系列已完结,相关章节请点击:
如果要购买地心一号平衡小车,可在淘宝搜索:地心一号,或者在公众号:AI电堂(可开发票) 中获取购买方式。